APC220
Материал из Multicopter Wiki

Содержание |
Характеристики [править]
- Дальность: 1000 м при скорости 2400 бод.
- Выходная мощность: 20mW
- Частота сигнала: 418..455 МГц
- Количество каналов: >100
- Размер модуля: 37.5 x 18.3 x 7.0 мм
- Интерфейс: UART/TTL
Схема [править]

Комплектация [править]
- Два модуля APC220
- USB переходник (для подключения одного из модулей к компьютеру)
Распиновка модуля APC220-43 [править]
| № контакта | Название | Описание |
|---|---|---|
| 1 | GND | «Земля» по питанию |
| 2 | VCC | «+» питания DC 3,5..5,5 В |
| 3 | EN | Power enable,≧1.6V or empty,≦0.5Vsleep. |
| 4 | RXD | UART вход, TTL |
| 5 | TXD | UART выход, TTL |
| 6 | MUX | Для расширения функций |
| 7 | SET | Установка параметров |
| 8 | NC | Не подсоединён |
| 9 | NC | Не подсоединён |
В большинстве случаев понадобятся только контакты питания GND и VCC, и контакты передачи данных RXD и TXD, которые нужно будет подключить к вашему полётному контроллеру.
Как подключить [править]
- Установить драйвер в операционную систему.
- Один из модулей подключить по USB. Желательно чтобы порт был COM1-8 и скорость 19200bps.
- Перезагрузить компьютер
- Запустить программу для настройки модулей и установить значения как на этой картинке:
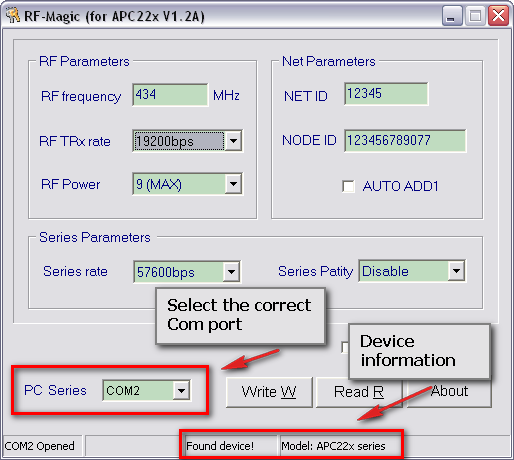
NET ID и NODE ID - задаются произвольно (на обоих модулях должны быть одинаковыми соответственно) - Нажать "Write"
- Вытащить этот модуль, вставить другой
- Повторить пункты 4 и 5

После этого модули будут связываться друг с другом.
Ссылки [править]
Важно [править]
- Желательно модуль APC220 запитывать от отдельного BEC, если основной BEC недостаточно силён и он может давать просадки по напряжению (например если от него же запитывается подвес для камеры). [1]
Где купить [править]
Найти предложения по APC220 в магазинах.